18 июня 2025, 05:39
Команда "Технокотики" из Томского физико-технического лицея в составе Лангемец Милана, Козлова Кира, Шукшина Настя и тренер Косаченко Сергей на XII Минском открытом роботурнире стала победителем в номинации "За креативное техническое решение" в категории Футбол автономных роботов RoboCupJunior Soccer Entry Lightweigh.

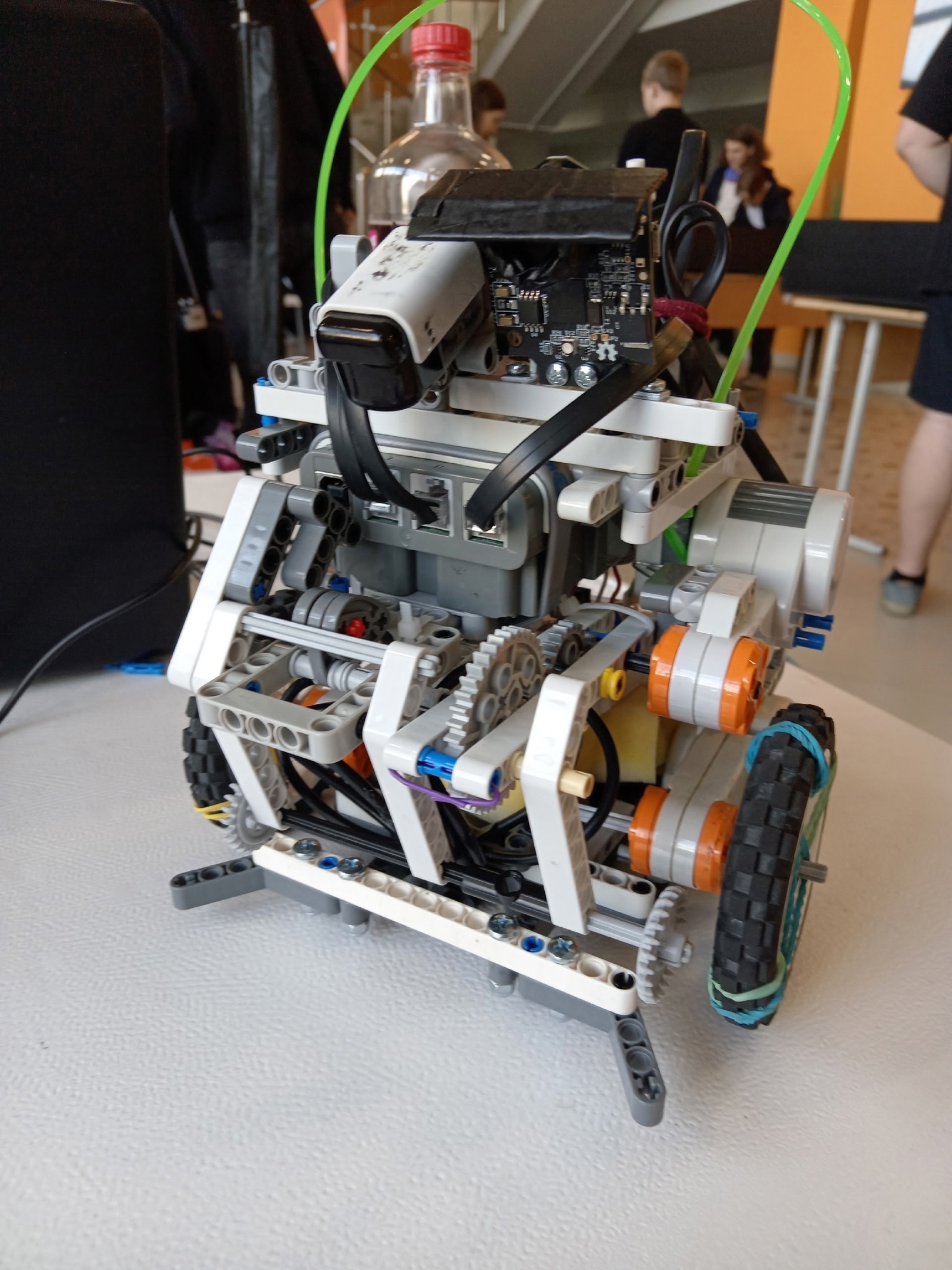
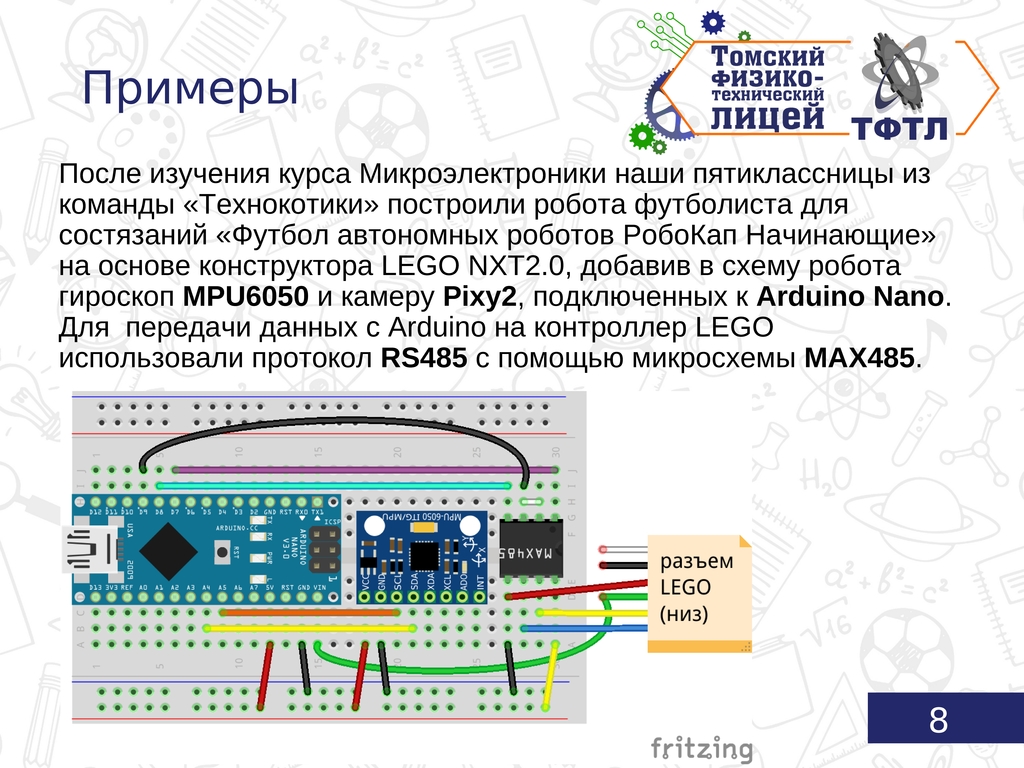
Команда построила и запрограммировала автономного робота-футболиста на дифференциальном шасси из LEGO NXT2.0, при этом расширив электронную схему робота датчиком гироскопа для ориентации на поле и камерой технического зрения для поиска ворот соперника под управлением дополнительного контроллера Arduino NANO. Связь и передача данных между NXT 2.0 и Arduino осуществлялись по протоколу RS485.
Технокотики vk.com/club230945123 благодарят организаторов XII Минского открытого роботурнира за великолепную работу и уютную атмосферу, Томский физико-технический лицей за организацию поездки на Соревнования, НПП "Томская электронная компания" за предоставление командной формы, родителей за любовь и поддержку!
Фотографии